Sensor ping merupakan sensor yang ada dalam perangkat elektronika dan digunakan untuk mengukur jarak suatu benda dari sensor ping itu sendiri. Sensor ping ini sendiri menggunakan teknik penangkapan gelombang seperti halnya alat sonar bekerja. Nah, dalam robot pemadam api sendiri. Sensor ping merupakan sensor yang krusial karena sangat penting dalam menghitung jarak robot dengan dinding di track.
Nah bagaimana sih cara memasang sensor ping di Arduino ? langsung saja, cek kebawah :
Alat yang diperlukan :
1. Arduino (saya menggunakan seri uno).
2. Sensor ping 1 biji (yang 3 kaki merek parallax).
3. jumper.*
4. protoboard (optional).
5. Komputer :)
6. Kabel Uploader
Perangkat Lunak (Software) :
1. IDE Arduino.
Langkah-langkah :
1. rangkai perangkat sesuai dengan gambar dibawah.
2. Jika sesuai code default di examples->sensors->ping:
3. Selanjutnya tinggal jalankan. dan nanti akan muncul seperti ini :
Sekian dari saya terimakasih.
Nah bagaimana sih cara memasang sensor ping di Arduino ? langsung saja, cek kebawah :
Alat yang diperlukan :
1. Arduino (saya menggunakan seri uno).
2. Sensor ping 1 biji (yang 3 kaki merek parallax).
3. jumper.*
4. protoboard (optional).
5. Komputer :)
6. Kabel Uploader
Perangkat Lunak (Software) :
1. IDE Arduino.
Langkah-langkah :
1. rangkai perangkat sesuai dengan gambar dibawah.
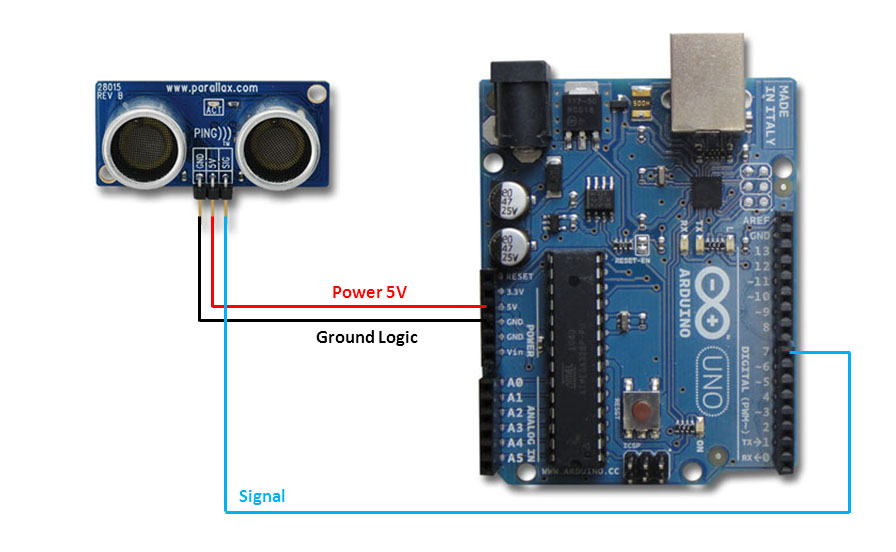 |
| Langsung tanpa melalui protoboard. (ilustrasi) |
 |
| dengan protoboard (ilustrasi). |
/* Ping))) Sensormaka, signal port ada di port no.7 di Arduino.
This sketch reads a PING))) ultrasonic rangefinder and returns the
distance to the closest object in range. To do this, it sends a pulse
to the sensor to initiate a reading, then listens for a pulse
to return. The length of the returning pulse is proportional to
the distance of the object from the sensor.
The circuit:
* +V connection of the PING))) attached to +5V
* GND connection of the PING))) attached to ground
* SIG connection of the PING))) attached to digital pin 7
http://www.arduino.cc/en/Tutorial/Ping
created 3 Nov 2008
by David A. Mellis
modified 30 Aug 2011
by Tom Igoe
This example code is in the public domain.
*/
// this constant won't change. It's the pin number
// of the sensor's output:
const int pingPin = 7;
void setup() {
// initialize serial communication:
Serial.begin(9600);
}
void loop() {
// establish variables for duration of the ping,
// and the distance result in inches and centimeters:
long duration, inches, cm;
// The PING))) is triggered by a HIGH pulse of 2 or more microseconds.
// Give a short LOW pulse beforehand to ensure a clean HIGH pulse:
pinMode(pingPin, OUTPUT);
digitalWrite(pingPin, LOW);
delayMicroseconds(2);
digitalWrite(pingPin, HIGH);
delayMicroseconds(5);
digitalWrite(pingPin, LOW);
// The same pin is used to read the signal from the PING))): a HIGH
// pulse whose duration is the time (in microseconds) from the sending
// of the ping to the reception of its echo off of an object.
pinMode(pingPin, INPUT);
duration = pulseIn(pingPin, HIGH);
// convert the time into a distance
inches = microsecondsToInches(duration);
cm = microsecondsToCentimeters(duration);
Serial.print(inches);
Serial.print("in, ");
Serial.print(cm);
Serial.print("cm");
Serial.println();
delay(100);
}
long microsecondsToInches(long microseconds) {
// According to Parallax's datasheet for the PING))), there are
// 73.746 microseconds per inch (i.e. sound travels at 1130 feet per
// second). This gives the distance travelled by the ping, outbound
// and return, so we divide by 2 to get the distance of the obstacle.
// See: http://www.parallax.com/dl/docs/prod/acc/28015-PING-v1.3.pdf
return microseconds / 74 / 2;
}
long microsecondsToCentimeters(long microseconds) {
// The speed of sound is 340 m/s or 29 microseconds per centimeter.
// The ping travels out and back, so to find the distance of the
// object we take half of the distance travelled.
return microseconds / 29 / 2;
}
3. Selanjutnya tinggal jalankan. dan nanti akan muncul seperti ini :
Sekian dari saya terimakasih.
Posting Komentar untuk "Arduino 3 : Memasang sensor Ping dengan Arduino"
Berilah komentar, saran, dan kritik dengan bijak